Stage3D各种投影矩阵的推导
本文将对Stage3D提供的10个投影矩阵逐个推导一遍,能力有限,如有错误请猛喷。
前期准备
我的推导原理是基于下边几个教程的,这些是我搜遍全网找到的最好的教程,只不过大都是OpenGL的,而我这里要基于他们的原理推导一遍Stage3D和WebGL的(下一篇再写WebGL的)。
最详细的矩阵投影3部曲:
1. Perspective Projection Matrix 2. OpenGL Perspective Projection Matrix 3. Orthographic Projection
OpenGL 投影矩阵详细推导过程:
我只写推导过程,不会详细解释原理,因为原理实在太难说清楚了,不过上边这些教程解释的非常清楚,你可能需要先看一遍再来看我的推导。如果不看,至少要知道这些:
- 左右手坐标系
- 透视投影和正交投影是什么
- 相似三角形
- 矩阵乘法
- 线性插值
- 其次坐标转普通坐标
- NDC(Normalized Device Coordinates)
观察Stage3D投影矩阵
先观察一下Stage3D的PerspectiveMatrix3D类提供的投影矩阵。
左手:
- perspectiveOffCenterLH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
- perspectiveLH(width:Number, height:Number, zNear:Number, zFar:Number)
- perspectiveFieldOfViewLH(fieldOfViewY:Number, aspectRatio:Number, zNear:Number, zFar:Number)
- orthoOffCenterLH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
- orthoLH(width:Number,height:Number,zNear:Number,zFar:Number)
右手:
- perspectiveOffCenterRH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
- perspectiveRH(width:Number, height:Number, zNear:Number, zFar:Number)
- perspectiveFieldOfViewRH(fieldOfViewY:Number, aspectRatio:Number, zNear:Number, zFar:Number)
- orthoOffCenterRH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
- orthoRH(width:Number,height:Number,zNear:Number,zFar:Number)
仔细观察后,根据参数不同一共提供了3种透视投影和2种正交投影生成方式,分为左右手两个版本,共10款,总有一款适合你。
提供左右手两个版本说明在眼空间可以任意使用左右手坐标系,只要在最后投影时选择合适的投影矩阵即可。
开始推导
免责声明:不会打公式,全手写,字丑勿怪。
先推导左手坐标系的5个矩阵,函数名和参数太长,眼花了,我来用首字母把参数简写一下。
例如: right -> r , width -> w ,zNear -> n , zFar -> f

发现参数都有near和far,区别只在于前几个参数。 其实只要推出参数最多的2个典型:
actionscript
1. perspectiveOffCenterLH(left:Number,right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
4. orthoOffCenterLH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
其他的都只是他们的变种而已。 从1号典型开始,看最终能否得到官方提供的矩阵:
actionscript
public function perspectiveOffCenterLH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number):void
{
this.copyRawDataFrom(Vector.<Number>([
2.0*zNear/(right-left), 0.0, 0.0, 0.0,
0.0, -2.0*zNear/(bottom-top), 0.0, 0.0,
-1.0-2.0*left/(right-left), 1.0+2.0*top/(bottom-top), -zFar/(zNear-zFar), 1.0,
0.0, 0.0, (zNear*zFar)/(zNear-zFar), 0.0
]));
}推导 1. perspectiveOffCenterLH
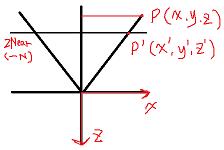
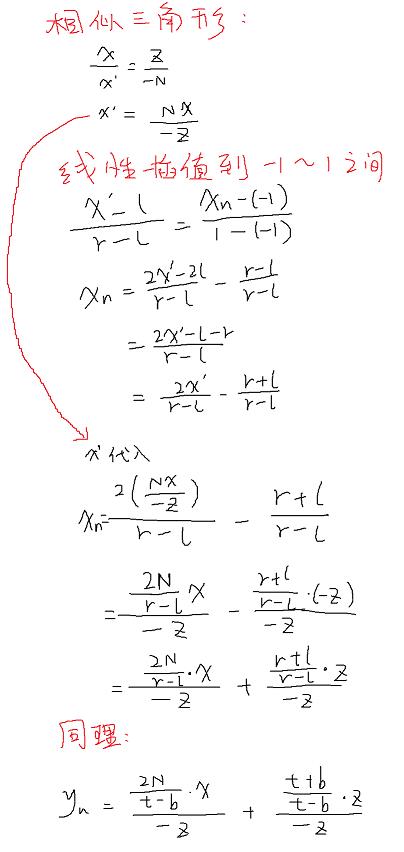
点p投影到p',N为近平面 ,左手坐标系,所以近平面在正z轴方向,画图

根据大小两个相似三角形,得到
求出x'为

同理 y'为
当点P投影到近平面,z'自然永远等于近平面N,所以先不要算他了,后边再说。x' y'已经是投影后的坐标了,但显卡需要的是NDC坐标,所以我们要根据线性插值把x' y'插值到NDC范围内, 结果记为xn yn。
注意:Stage3D的NDC范围在(-1,-1,0)到(1,1,1)
已知 left, right,bottom,top ,简写为 l, r, b, t ,投影后的点为x',根据线性插值公式求出缩放后的Xn.
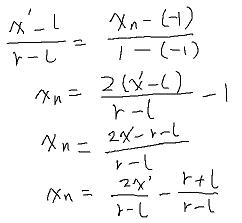
同理yn等于
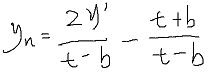
把上边的求得的投影点x',y'带入xn,yn,整理。
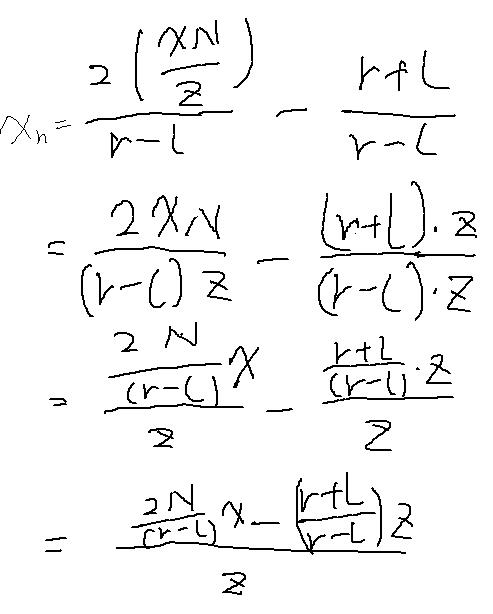
为啥整理成这种形式呢?因为这是一个巧妙的安排,毕竟我们最终要用一个矩阵乘法 + 一个其次坐标转普通坐标 来完成整个转换,把z放到分母可以方便后边做其次坐标转普通坐标,后边会看到两个分子也可以方便的带入矩阵。
同理yn等于

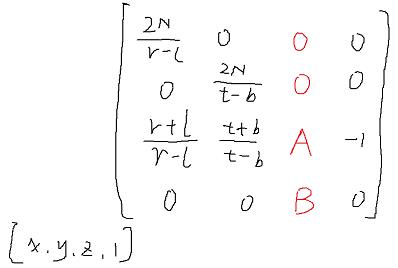
好啦,现在改成矩阵形式,投影前的点**[x,y,z,1]乘以一个矩阵M** 得到的其次坐标,再除以w转成普通坐标后,应该得到的结果为**[xn,yn,zn,1]**求这个矩阵。
注意:Stage3D使用行向量右乘列矩阵
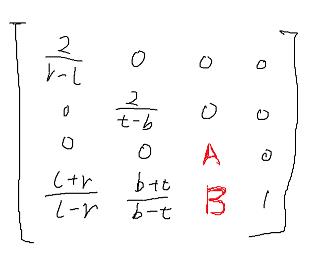
根据上边我们求得的结果,已经可以猜出矩阵部分元素了
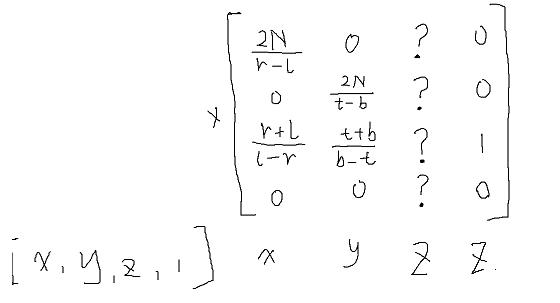
就差z坐标了,z坐标投影后永远等于近平面n,保存他没有意义了,我们要用z来保存转换之前的深度,并线性插值到NDC范围内提供给设备,注意Stage3D中zn的NDC范围在0~1之间,但按照之前xy线性插值的方法,我推不出来 , 需要换种想法了,之前提到的教程里也都是这种方法。
看上边的图,[x,y,z,1]点乘[?,?,?,?] 应该等于转换后的其次坐标z , 由于z与x,y无关,所以把这两个位置都写成0,借助后两个元素A,B来解决线性插值。
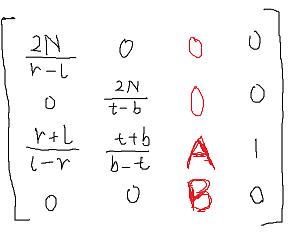
[x,y,z,1] 点乘[?,?,?,?] 就变成了 [x,y,z,1]点乘[0,0,A,B]
zn其次坐标就等于 x * 0 + y * 0 + A * z + 1 * B
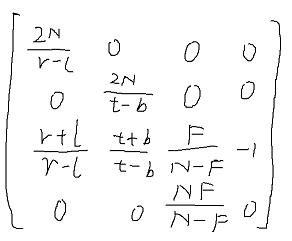
其次转普通坐标
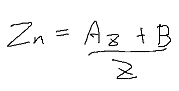
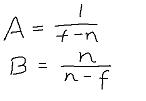
zn的NDC范围在 0~1之间,说明在zNear时为0,zFar时为1,so
解方程组求A,B
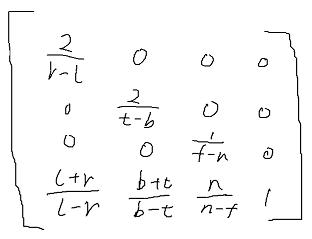
带入矩阵,最终结果
对比一下官方的结果,
actionscript
public function perspectiveOffCenterLH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number):void
{
this.copyRawDataFrom(Vector.<Number>([
2.0*zNear/(right-left), 0.0, 0.0, 0.0,
0.0, -2.0*zNear/(bottom-top), 0.0, 0.0,
-1.0-2.0*left/(right-left), 1.0+2.0*top/(bottom-top), -zFar/(zNear-zFar), 1.0,
0.0, 0.0, (zNear*zFar)/(zNear-zFar), 0.0
]));
}
好像除了第3行第1列和第2列不一样,其他都一样的。
仔细看看官方给的第3行,第1列
-1.0-2.0*left/(right-left)

原来跟我们的一样,而且我们的版本更简洁一些:)
第3行第2列也一样,就不写了。
推导 2. perspectiveLH
actionscript
perspectiveLH(width:Number, height:Number, zNear:Number, zFar:Number)
这个是以视口的中心做投影,所以
left = - right top = - bottom
也就是说
r + l = 0 r - l = width
t + b = 0 t - b = height
直接带入上一个推导的矩阵
把上边的矩阵简化,得到
正好是官方的这个,一模一样:
actionscript
public function perspectiveLH(width:Number, height:Number, zNear:Number, zFar:Number):void
{
this.copyRawDataFrom(Vector.<Number>([
2.0*zNear/width, 0.0, 0.0, 0.0,
0.0, 2.0*zNear/height, 0.0, 0.0,
0.0, 0.0, zFar/(zFar-zNear), 1.0,
0.0, 0.0, zNear*zFar/(zNear-zFar), 0.0
]));
}
推导 3. perspectiveFieldOfViewLH
actionscript
perspectiveFieldOfViewLH(fieldOfViewY:Number,aspectRatio:Number,zNear:Number,zFar:Number)
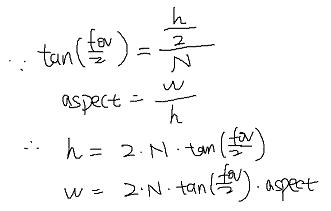
这里有了两个新参数fov和aspect
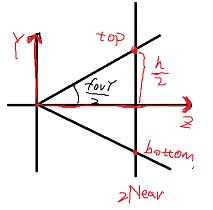
经过研究,这里的 fov 如图所示,是指YZ平面,top和bottom之间的夹角。
看看能不能把这两个参数转成width和height表示,这样就可以直接带入上一个推出的矩阵得到新矩阵了
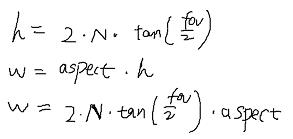
fov,aspect 与 w ,h是什么关系?
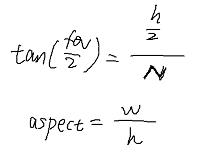
这样就可以把h和w求出来了
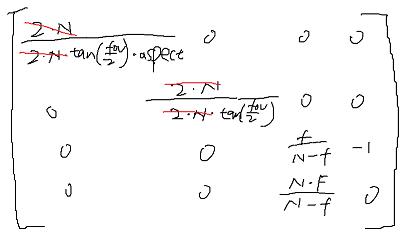
带入上一个矩阵
得到
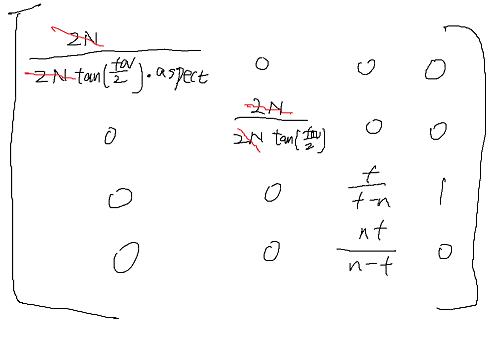
仔细看一下正好与官方提供的一样。
actionscript
public function perspectiveFieldOfViewLH(fieldOfViewY:Number,aspectRatio:Number,zNear:Number,zFar:Number):void {
var yScale:Number = 1.0/Math.tan(fieldOfViewY/2.0);
var xScale:Number = yScale / aspectRatio;
this.copyRawDataFrom(Vector.<Number>([
xScale, 0.0, 0.0, 0.0,
0.0, yScale, 0.0, 0.0,
0.0, 0.0, zFar/(zFar-zNear), 1.0,
0.0, 0.0, (zNear*zFar)/(zNear-zFar), 0.0
]));
}
推导 4. orthoOffCenterLH
很难想象这么重要的一个类,官方给的orthoOffCenterLH矩阵居然是错的,而且adobe已经停止支持这个库了,有人提交了错误,也已经没人回应了。
正确的应该是这样的:
actionscript
public function orthoOffCenterLH(left:Number,right:Number, bottom:Number, top:Number, zNear:Number, zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0/(right-left), 0.0, 0.0, 0.0,
0.0, 2.0/(top-bottom), 0.0, 0.0,
0.0, 0.0, 1.0/(zFar-zNear), 0.0,
(left+right)/(left-right), (bottom+top)/(bottom-top), zNear/(zNear-zFar), 1.0
]));
}
推导比透视投影简单,因为是正交投影则,所以
x = x' y = y'
只需要各个方向缩放到NDC范围内就好了,跟之前一样,线性插值

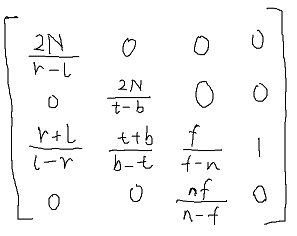
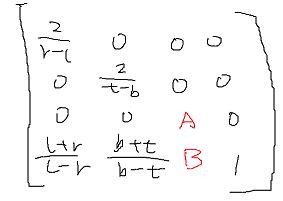
放到矩阵里
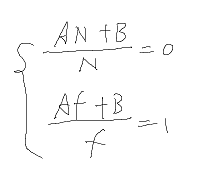
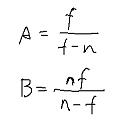
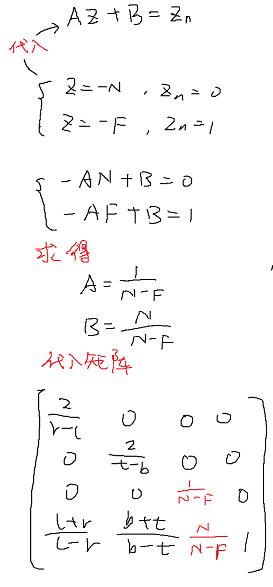
Az+B 在近裁剪面为0,远裁剪面为1,so
A n + B = 0 A f + B = 1
解得:
放入矩阵
actionscript
public function orthoOffCenterLH(left:Number,right:Number, bottom:Number, top:Number, zNear:Number, zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0/(right-left), 0.0, 0.0, 0.0,
0.0, 2.0/(top-bottom), 0.0, 0.0,
0.0, 0.0, 1.0/(zFar-zNear), 0.0,
(left+right)/(left-right), (bottom+top)/(bottom-top), zNear/(zNear-zFar), 1.0
]));
}
推导 5. orthoLH
actionscript
orthoLH(width:Number,height:Number,zNear:Number,zFar:Number)
由于是以视口为中心的正交投影矩阵,所以:
left = - right top = - bottom
也就是说
r + l = 0 r - l = width
t + b = 0 t - b = height
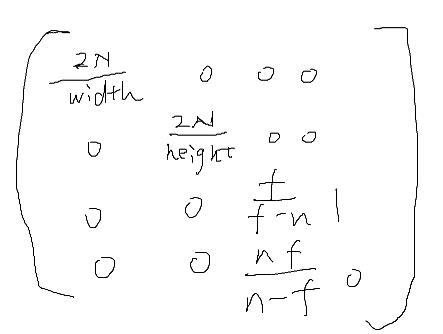
带入刚才求得的这个矩阵
得到:
2/w, 0, 0, 0, 0, 2/h, 0, 0, 0, 0, 1/f-n, 0, 0, 0, n/n-f, 1
对比官方的版本,是一样的
actionscript
public function orthoLH(width:Number,height:Number,zNear:Number,zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0/width, 0.0, 0.0, 0.0,
0.0, 2.0/height, 0.0, 0.0,
0.0, 0.0, 1.0/(zFar-zNear), 0.0,
0.0, 0.0, zNear/(zNear-zFar), 1.0
]));
}
至此左手5个已经推导完毕,右手的类似,要加快速度了。
推导 6. perspectiveOffCenterRH
从参数最多的开始
actionscript
perspectiveOffCenterRH(left:Number, right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
点p投影到p' ,N为近平面 ,右手坐标系,所以近平面在负z轴方向,这次换个方向画图吧
先求投影点x' y',然后插值到NDC范围-1~1之间, 结果记为xn yn。
分母都是-z 说明在做透视除法时w为-z ,所以猜到矩阵为
处理z

AB带入矩阵
对比官方提供的,稍微整理一下正负号就一模一样了。
actionscript
public function perspectiveOffCenterRH(left:Number,right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0*zNear/(right-left), 0.0, 0.0, 0.0,
0.0, -2.0*zNear/(bottom-top), 0.0, 0.0,
1.0+2.0*left/(right-left), -1.0-2.0*top/(bottom-top), zFar/(zNear-zFar), -1.0,
0.0, 0.0, (zNear*zFar)/(zNear-zFar), 0.0
]));
}
有了这个,后边两个变种就容易了
推导 7. perspectiveRH
actionscript
perspectiveRH(width:Number,height:Number,zNear:Number,zFar:Number)
以视口的中心做投影,所以
left = - right top = - bottom
也就是说
r + l = 0 r - l = width t + b = 0 t - b = height
直接带入上一个推导的矩阵,得到的结果跟官方一模一样。
actionscript
public function perspectiveRH(width:Number,height:Number,zNear:Number,zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0*zNear/width, 0.0, 0.0, 0.0,
0.0, 2.0*zNear/height, 0.0, 0.0,
0.0, 0.0, zFar/(zNear-zFar), -1.0,
0.0, 0.0, zNear*zFar/(zNear-zFar), 0.0
]));
}
推导 8. perspectiveFieldOfViewRH
actionscript
perspectiveFieldOfViewRH(fieldOfViewY:Number,aspectRatio:Number,zNear:Number,zFar:Number)
跟左手差不多,z轴相反,就不画图了
带入上个矩阵
对比,一模一样:)
actionscript
public function perspectiveFieldOfViewRH(fieldOfViewY:Number,aspectRatio:Number,zNear:Number,zFar:Number):void {
var yScale:Number = 1.0/Math.tan(fieldOfViewY/2.0);
var xScale:Number = yScale / aspectRatio;
this.copyRawDataFrom(Vector.<Number>([
xScale, 0.0, 0.0, 0.0,
0.0, yScale, 0.0, 0.0,
0.0, 0.0, zFar/(zNear-zFar), -1.0,
0.0, 0.0, (zNear*zFar)/(zNear-zFar), 0.0
]));
}
推导 9. orthoOffCenterRH
actionscript
orthoOffCenterRH(left:Number,right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number)
这个官方提供的矩阵也错了,正确的应该这样:
actionscript
public function orthoOffCenterRH(left:Number,right:Number,bottom:Number,top:Number,zNear:Number, zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0/(right-left), 0.0, 0.0, 0.0,
0.0, 2.0/(top-bottom), 0.0, 0.0,
0.0, 0.0, 1.0/(zNear-zFar), 0.0,
(left+right)/(left-right), (bottom+top)/(bottom-top), zNear/(zNear-zFar), 1.0
]));
}
因为正交投影,则
x = x' y = y'
直接线性插值到 -1 ~ 1之间

推出矩阵
求变换后的Zn
推导 10. orthoRH
actionscript
orthoRH(width:Number,height:Number,zNear:Number,zFar:Number)
最后一个视口中心投影 ,这个官方提供的矩阵也有一个笔误 @_@,第3行第3列:
1.0/(zNear-zNear)
应该为
1.0/(zNear-zFar)
开始推导:
r = - l b = -t
so
r - l = w r + l = 0 t - b = h t + b = 0
带入上边矩阵,很明显得到
actionscript
public function orthoRH(width:Number,height:Number,zNear:Number,zFar:Number):void {
this.copyRawDataFrom(Vector.<Number>([
2.0/width, 0.0, 0.0, 0.0,
0.0, 2.0/height, 0.0, 0.0,
0.0, 0.0, 1.0/(zNear-zFar), 0.0,
0.0, 0.0, zNear/(zNear-zFar), 1.0
]));
}
全文完。